Like if the automated vehicle is associated with the remote control by means of Bluetooth module (Like HC-05 Bluetooth Module), it can have greatest operational range up to a separation of 10 meter. In the event that the mechanical vehicle is associated with the remote control by means of RF module, it can have most extreme operational range up to a separation of 50 to 60 meter. In this venture, a web controlled automated vehicle is outlined which will be controlled by a site page. The site page could be opened on any work area, workstation or portable. The mechanical vehicle could be at wherever with web access and it very well may be remotely controlled from anyplace.
The automated vehicle is outlined on Particle Photon. For making the vehicle, two DC engines are interfaced to the Particle board by means of L293D engine driver IC. A temperature and dampness sensor DHT-11 and LDR sensor are additionally interfaced to the board to monitor the physical condition around the mechanical auto. Molecule Photon is an IOT board with Wi-Fi and Bluetooth modules on board. The board works over the air by associating with a Wi-Fi association. The board associates with the Particle's Cloud benefit consequently and can be controlled over web by sending information through the organization's cloud benefit.
Molecule Photon is an Arduino perfect IOT board. For composing the program code for any Photon, engineer needs to make a record on Particle site and enroll the Photon board with his client account. The program code at that point can be composed on Web IDE at the Particle's site and exchanged to an enlisted IOT board over the web. On the off chance that the chose Particle board, Photon here, is exchanged on and associated with cloud administration of the Particle, the code is scorched to the chosen board over the air through web association and the board begins working as indicated by the exchanged code.
For controlling board over web, a website page is outlined which utilizes Ajax and JQuery to send information to the board utilizing HTTP POST strategy. The site page recognizes the board by a gadget ID and interfaces with the Particle's Cloud Service through an entrance token.
Segments Required -
Collector Side:
1. Molecule Photon.
2. DHT11 sensor.
3. LDR sensor.
4. Home Wi-Fi association.
5. L293D Motor Driver IC
9. DC Motors
Transmitter Side:
1. Website page (EngineersGarageIoT.html)
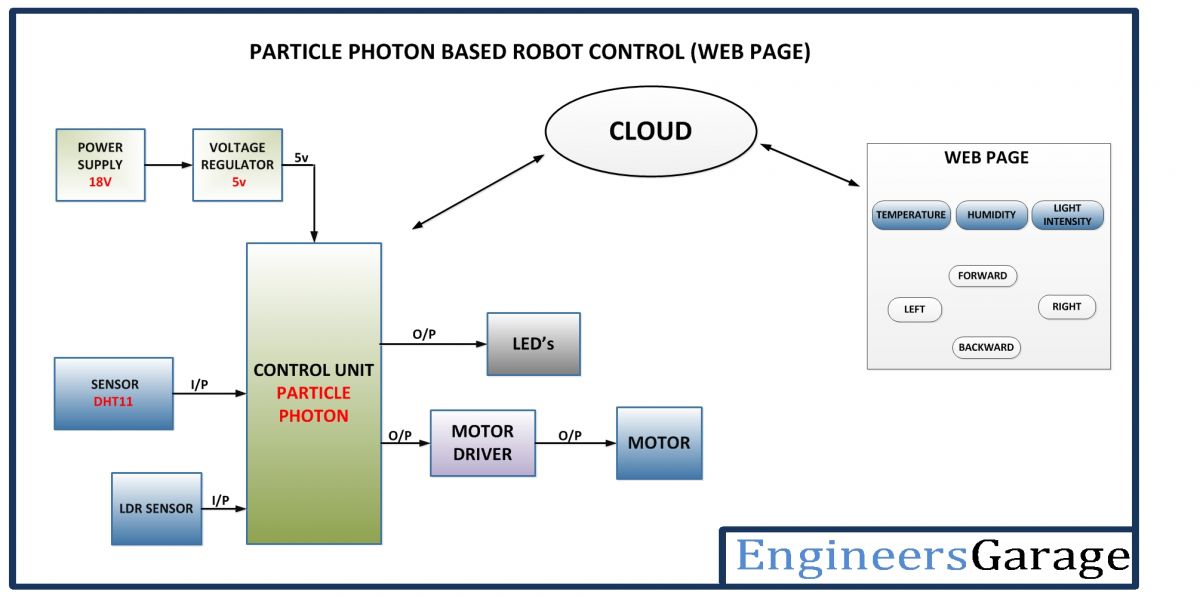
Square Diagram -
Web Controlled Robotic Car
Molecule Photon based Internet Controlled Robot Car IOT Project Block Diagram
Circuit Connections -
Web Controlled Robotic Car
Web Controlled Robotic Car Circuit Connection
The engine driver IC and the sensors are interfaced to the Particle Photon. The circuit is amassed in the accompanying way -
Power Supply - In the circuit, Photon and different ICs require a 5V controlled DC for their task. A 18V battery is utilized as the essential wellspring of intensity. The supply from the battery is directed to 5V and 12V utilizing 7805 and 7812 ICs. The stick 1 of both the voltage controller ICs is associated with the anode of the battery and stick 2 of the two ICs is associated with ground. The particular voltage yields are drawn from stick 3 of the separate voltage controller ICs. A LED alongside a 10K Ω pull-up resistor is likewise associated between shared belief and yield stick to get a visual trace of supply progression.
DHT-11 Temperature and Humidity Sensor - The DHT - 11 sensor peruses the surrounding temperature and mugginess and transfers the information to microcontroller as computerized information. The information stick of temperature and stickiness sensor DHT11 is associated with stick A0 of the Particle Photon and VCC and ground are associated with the basic VCC and ground.
LDR Sensor - The LDR is utilized to detect the power of light. The sensor is associated with the A1 stick of Particle Photon. The sensor is associated in a potential divider circuit. The LDR gives a simple voltage which is changed over to advanced perusing by the in-assembled ADC.
L293D DC Motor Driver IC - The L293D is the engine control driver IC. It has 16 pins with following pin setup:
Web Controlled Robotic Car
There are two DC engines utilized for making the mechanical auto. The DC engines are interfaced between pins 3 and 6 and pins 14 and 11 of the engine driver IC.
The L293D IC controls the DC Motors as indicated by the accompanying truth tables:
Web Controlled Robotic Car
Web Controlled Robotic Car
The stick 4, 5, 13 and 12 of the L293D are grounded while stick 1, 16 and 9 are associated with 5V DC and stick 8 is associated with 9V DC. The pins 15, 2, 7 and 10 of the engine driver IC are associated with pins D3, D2, D1 and D0 of Particle Photon.
How the circuit functions -
Web Controlled Robotic Car
Web Controlled Robotic Car Circuit Connection Working
Once the program code is exchanged to Particle Photon, it begins working as indicated by it. The Particle Photon ought to be associated with any web hotspot by means of Wi-Fi. The Arduino good code on Photon at first sends a LOW rationale at all the information pins stopping both the engines and begins getting information from the sensors.
DHT11 Temperature and Humidity Sensor is an advanced sensor with inbuilt capacitive mugginess sensor and Thermistor. It transfers an ongoing temperature and mugginess perusing at regular intervals. The sensor works on 3.5 to 5.5 V supply and can read temperature between 0° C and 50° C and relative stickiness somewhere in the range of 20% and 95%. The DHT 11 Sensor sends information in the advanced shape to a controller stick on one-wire convention which must be actualized on firmware side. First the information stick is designed to include and a begin flag is sent to it.
The begin flag includes a LOW for 18 milliseconds taken after by a HIGH for 20 to 40 microseconds taken after by a LOW again for 80 microseconds and a HIGH for 80 microseconds. In the wake of sending the begin flag, the stick is designed to advanced yield and 40-bit information containing the temperature and mugginess perusing is locked out. Of the 5-byte information, the initial two bytes are whole number and decimal piece of perusing for relative stickiness individually, third and fourth bytes are whole number and decimal piece of perusing for temperature and last one is checksum byte. The one-wire convention is executed on the firmware utilizing an open-source library accessible for Photon.
The IR sensor yield a simple voltage at the interfaced controller stick. The simple voltage is perused and digitized utilizing in-assembled ADC channel. The analogRead() work is utilized to peruse simple voltage at the controller stick.
The read sensor information is passed to the Particle Cloud by means of Wi-Fi association and the board sits tight for direction to move the vehicle. The client is shown sensor information on the page and have catches to move and turn the auto on a similar website page. As the client taps a catch, the direction through string is exchanged over the web by means of Particle's Cloud benefit. The strings are gotten by means of HTTP POST strategy by the Particle Photon. On recognizing order, the load up changes the computerized rationale at the information pins pivoting the engines in clockwise or against clockwise bearing.
In the robot circuit considering the two-wheel drive either front or back conceivable drive, right hand side (RHS) engine is associated between pins 3 and 6 and left hand side (LHS) engine is associated between stick 11 and 14 of the L293D. The RHS engine is controlled by stick 2 and 7 of the L293D while LHS engine is controlled by stick 10 and 15 of L293D. Henceforth, to move robot various way following computerized yields are required at the L293D pins:
Web Controlled Robotic Car
So to drive robot forward in this two-wheel drive, RHS engine should be pivoted clockwise and LHS engine should be turned anticlockwise. This is finished by passing LOW flags to stick 2 and 15 of L293D and HIGH flag to stick 7 and 10 of L293D as per reality table. To drive robot in reverse (material to two wheel drive) RHS engine should be pivoted hostile to clockwise and LHS engine should be turned clockwise. This is finished by passing LOW flags to stick 7 and 10 of L293D and HIGH flag to stick 2 and 15 of L293D as indicated by reality table.
To turn the robot right, RHS engine must be ceased and LHS engine should be pivoted hostile to clockwise. This is finished by passing LOW flags to stick 2, 7 and 15 of L293D and HIGH flag to stick 10 of L293D as indicated by reality table. To turn the robot left, LHS engine must be ceased and RHS engine should be pivoted clockwise way. This is finished by passing LOW flags to stick 2, 10 and 15 of L293D and HIGH flag to stick 7 of L293D as indicated by reality table. The engines are ceased in the venture by giving both control contributions of L293D for each engine a LOW rationale.
Look at the photon code to figure out how the Arduino good code distinguishes direction over the air and peruses information from sensors and distribute it on the connected information logging URL. Figure out how the string of the direction is controlled to change computerized rationale at pins associating with the L293D engine driver IC.
Programming Guide -
Photon Code
As a matter of first importance the library for DHT sensor is foreign made. The library is naturally included by the molecule's Web IDE. A steady is characterized to signify stick to which DHT 11 sensor is interfaced and a consistent is characterized to mean variation of DHT sensor. Factors to hold estimation of temperature, stickiness and light power are announced. Factors meaning engine control rationale are proclaimed and appointed microcontroller pins. A protest of DHT compose is announced.
A character exhibit is announced to hold the sensor information to be sent to the website page.
No comments:
Post a Comment